RockMass Technologies Inc.
Axis Mapper

|




The Axis Mapper is a new method for obtaining structure orientation through a mobile platform containing a scannerless LiDAR and an inertial measurement unit (contains an accelerometer, magnetometer, and gyroscope). The traditional orientation methods (compass, stationary LiDAR, and photogrammetry) require additional post-processing or manual intervention to derive the orientation of identified structures.
The Axis Mapper is a new method for obtaining structure orientation through a mobile platform containing a scannerless LiDAR and an inertial measurement unit (contains an accelerometer, magnetometer, and gyroscope). The traditional orientation methods (compass, stationary LiDAR, and photogrammetry) require additional post-processing or manual intervention to derive the orientation of identified structures. The Axis Mapper approach is proven to be up to 5.2 times faster than existing methods, easier to use, and excels in underground environments.
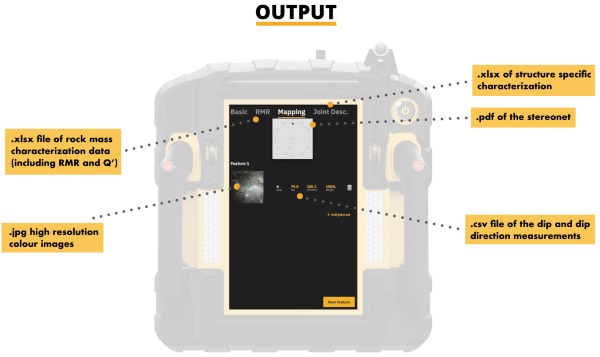
Rather than constructing a large, high-resolution point cloud and applying standard techniques to extract structure orientations, the Axis Mapper is designed to collect and calculate numerical structural orientation measurement in real-time. The Axis Mapper is easily carried and operated by a single person with no dependence on GPS.
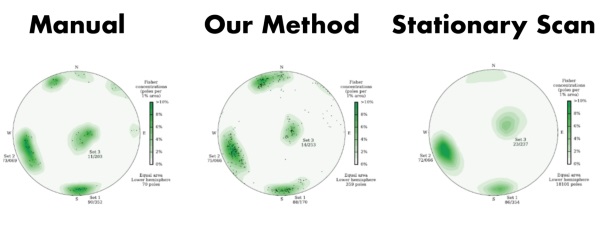
The techniques used in the Axis Mapper are fast, fully automated, and require no manual pruning of outliers. The time and effort required to collect data is significantly reduced compared with manual techniques, photogrammetry, and stationary LiDAR. The following image shows the comparison in accuracy of stereonets using a compass, station LiDAR, and Axis Mapping (Gallant et al., 2016).
The Axis Mapper uses the Axis Mapping methodology developed in the Offroad Robotics Lab by Dr. Marc Gallant and Dr. Joshua Marshall.